





TW-XYG01可移动V2x车联网智能感知基站
一、产品概述
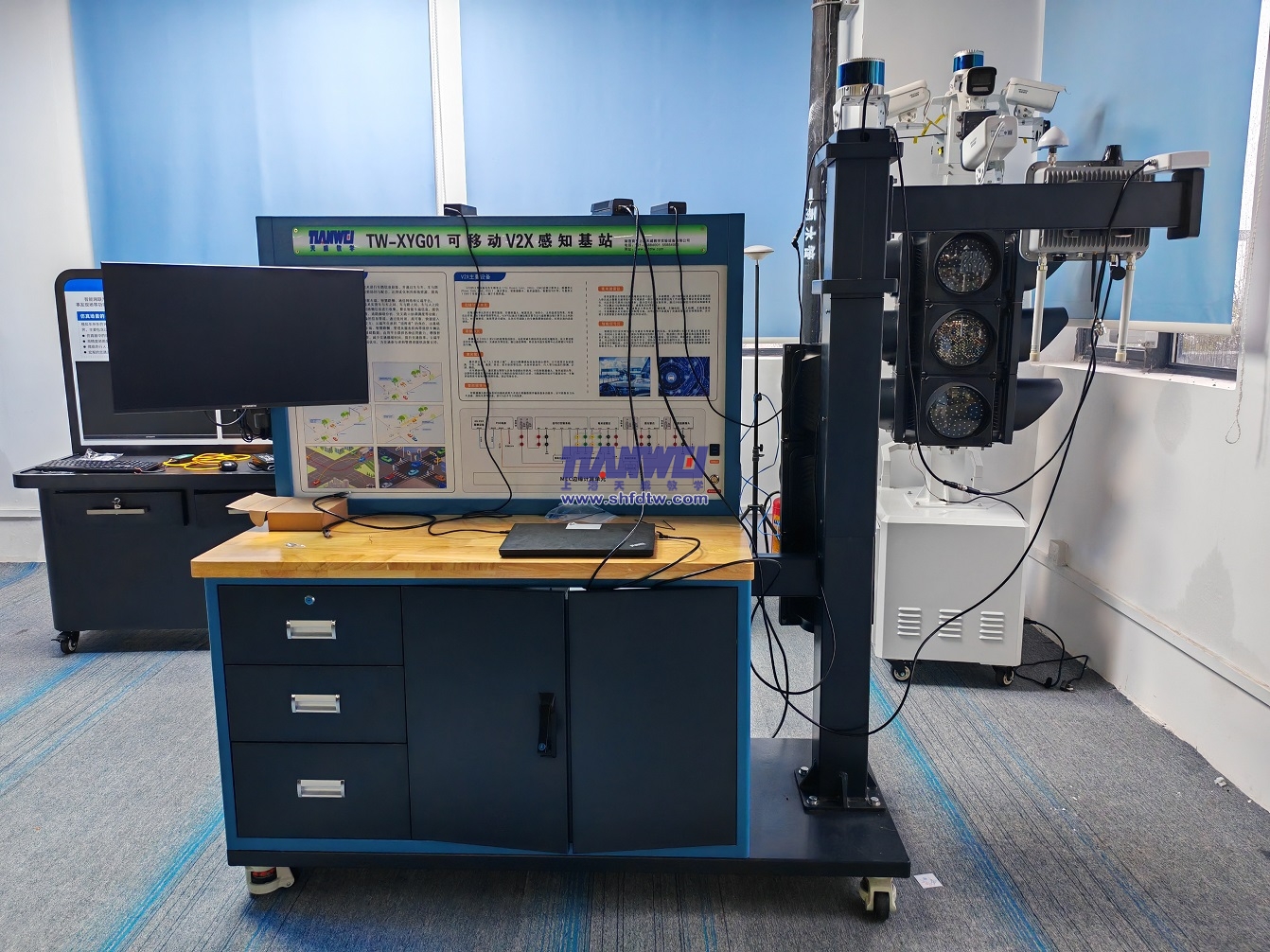
可移动 V2x感知基站主要由RSU路侧设备、边缘计算单元、感知摄像头、车辆跟踪雷达、激光雷达等设备组成,路侧设备安装部署在移动式支架上,根据实际路况调整路侧设备的安装角度。智能V2X路侧设备包含移动式智慧交通信号杆和内嵌的软件算法,设备可通过网线/光纤连成整体,有效提高学生对车路协同应用场景的理解和实践能力。
二、优势特点
V2X示范道路智慧路口一体化系统可通过增减设备、改变设备安装位置、角度等,提供不同道路类型的最优部署方案;
集成通讯设备(RSU)、感知设备(摄像头、激光雷达、毫米波雷达)、边缘计算单元等于一体的系统,可检测集成后的系统性能;
安装灵活,该设备可放到试验场,实现车路协同测试环境,如闯红灯预警、绿波车速引导、交叉路口碰撞预警等。
三、产品参数
1、RSU路侧设备
C-V2X通信要求:支持 3GPP R14 PC5 mode4,支持 5905-5925MHz内10MHz/20MHz可配置,满足车联网的数据传输通信要求;支持DSMP层数据传输;模组支持通过网口或者配置软件支持数据透传;C-V2X直连通信;空口发送支持应用层以10Hz频率发送报文;应用层可见整体丢包率不高于1% 。
平均通信时延<20ms;
频段:5905~5925MHz。
配备硬件加密模块,支持硬件加解密算法。
最大发射功率:PC5口: 23dBm±2dB; LTE Uu 口: 23dBm±2dB; 平均功耗≤10W。
C-V2X无线覆盖:最大通信距离不小于600m。
支持RJ45。
通信制式:3G/4G Cell、LTE-V2X PC5、WLAN 802.11 b/g/n。
GNSS:常规支持GPS / 北斗,配置GNSS天线。水平定位精度优于0.5m(95%),垂直定位精度优于1.5m(95%)。
电源:支持DC/POE供电。
防护等级:IP66
智能路侧终端釆用目前成熟C-V2X通信方式,路侧系统满足互联互通“四跨”要求。
智能路侧终端应用层釆用T/CSAE 53-2020数据标准;釆用LTE 3GPP Rel.14 技术,天线接口:GPS/BD*1, C-V2X *2通道:1发2收, LTE*1,WIFI*1。
支持国密算法(软件或硬件)。
设备工作环境温度范围在-40℃~+85℃;
支持中国汽车工程学会V2X 应用层消息集(T/CSAE-53 2020),满足YD/T 3709-2020《基于LTE的车联网无线通信技术消息层技术要求》标准要求;
运维支持:支持通过本地维护工具或者远程网管对设备进行运维;支持在线升级,确保实现不需要返厂升级;支持近端无线运维以及远端集中运维;支持模组状态查询,例如版本号查询,状态信息;
2、MEC边缘计算单元:
CPU: 6核12线程,主频2.5G,三级缓存12M;
GPU: 独立图像处理器,CUDA处理器数量3584,显存频率15Gbps,显存容量 12G DDR6;
内存:32GB LPDDR4x2666MhZ
存储:固态硬盘500GB
接口:网络为千兆以太网+WiFi, USB3.0
3、智能摄像头:
传感器类型:1/2.7" Progressive Scan CMOS
最低照度:彩色:0.01 Lux @(F1.2,AGC ON),0 Lux with IR
快门:1/3 s~1/100,000 s
宽动态:数字宽动态
日夜切换模式:ICR红外滤片式
焦距&视场角:4 mm,水平视场角:81.3°,垂直视场角:43.6°,对角视场角:96.9°
最大图像尺寸:1920 × 1080
主码流帧率分辨率:50 Hz,25 fps(1920 × 1080,1280 × 720)
视频压缩码率:32 Kbps~8 Mbps
H.265编码类型:Main Profile
码率控制:定码率,变码率
启动及工作温湿度:-30 °C~60 °C,湿度小于95%(无凝结)
供电方式:DC 12 V ± 25%,支持防反接保护
防护:IP66
4、毫米波雷达
工作频率范围:76GHz - 77GHz;
探测距离范围:0.2m - 250m;
距离测量分辨率:远距±1.79m;近距±0.39m
距离测量精度:远距 ±0.40m;近距 ±0.10m
速度范围:-400 km/h...+200 km/h (- 去向目标... + 来向目标)
速度分辨率:远距 0.37km/h,近距 0.43km/h
速度精度:±0.1 km/h
探测目标类型:远离目标、靠近目标、静止目标、横穿静止目标、横穿目标;
提供CAN/CANFD数据输出,至少包含跟踪目标ID、距离、速度、RCS等信息;
工作温度至少满足:-40℃-85℃;
工作电压:9-16V;
防护等级:不低于IP67

5、16线激光雷达:
激光波长:905nm
测距能力:150m(110m@10% NIST)
盲区:≤0.2m
精度(典型值):1cm
水平视场角:360°
垂直视场角:30°(-15°~+15°)
水平角分辨率:0.1°/0.2°/0.4°
垂直角分辨率:2°
帧率:5Hz/10Hz/20Hz
转速:300/600/1200rpm(5/10/20Hz)
工作电压:9V-32V
功率(典型值):11W
工作温度:-40℃~+60℃
防护等级:IP67、IP6K9K
6、红绿灯
灯盘: 200mm
电压: DC 12V
配有遥控器,可以快速改变放行方向或一键黄闪、全红、开关机;
有倒计时数码管显示或实时时间显示功能;
支持远程控制和系统查询。
7、红绿灯控制器
具备编程功能,可自由设置红绿灯运行逻辑
继电器参数:触点材料:AgSn02;额定负载:10A@250VAC;10A@28VDC(阻性);接触电阻:<100mΩ;电气寿命:10万次
供电电压:12V
通讯方式:RS485;RS232;CAN
默认串口参数:波特率115200,校验位N,数据位8,停止位1
通讯协议:Modbus协议;自定义协议;CANopen协议;

四、软件功能
1、感知算法软件
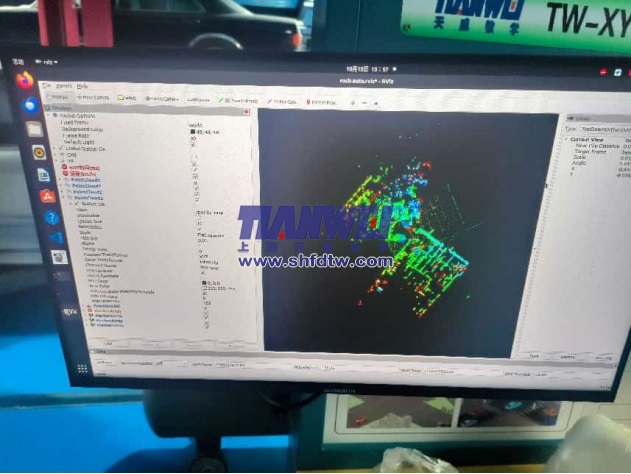
激光雷达感知模块,具备深度学习的识别方式,可从智慧灯杆视角获取道路目标信息。算法可进行二次开发;
毫米波雷达感知模块,能够对毫米波数据进行处理,剔除干扰信号,从智慧灯杆视角获取道路目标信息。算法可进行二次开发;
视觉感知模块,采用深度学习目标识别算法,对目标进行分类。算法可进行二次开发;
目标识别采用激光雷达目标检测,类别和坐标都可以输出。算法可进行二次开发和替换;
2、红绿灯控制
内含红绿灯通信及控制软件,可控制红绿灯根据预设通行模式进行转相;
具备多种红绿灯工作模式;
可自由设置绿灯及红灯时长;
控制软件可修改;
提供远程界面,可以远程改变红绿灯工作状态;
3、道路环境录入
具备生成点云图及高精地图的能力,方便道路环境信息录入,使用设备的激光雷达对周围环境进行扫描,同时与环境真实信息进行比对,建立车路协同真实运行环境。
加载高精地图信息后,可提供图形界面,框选监测区域的位置和边界;
可设置区域属性,对区域内的车辆行人进行监测及统计,输出统计结果
4、自定位自标定系统
可加载自动驾驶车的高精地图数据;
可在地图中实现自主定位,准确标注设备在地图中的位置;
自定位完成后,传感器可实现自标定,将感知获取的道路信息,转换到地图坐标系下,并在可视化界面中显示。
五、实训项目红绿灯
16线激光雷达拆装
16线激光雷达模块组成及功能介绍
智能交通跟踪雷达拆装
智能交通跟踪雷达模块组成及功能介绍
MEC边缘计算单元装调
MEC边缘计算单元组成及功能介绍
红绿灯通行规则设置
路口监测区域的设置及测试
V2X UU通道通讯测试(需配合OBU)
V2X PC5通道通信测试